6DOF Simulator and HUD
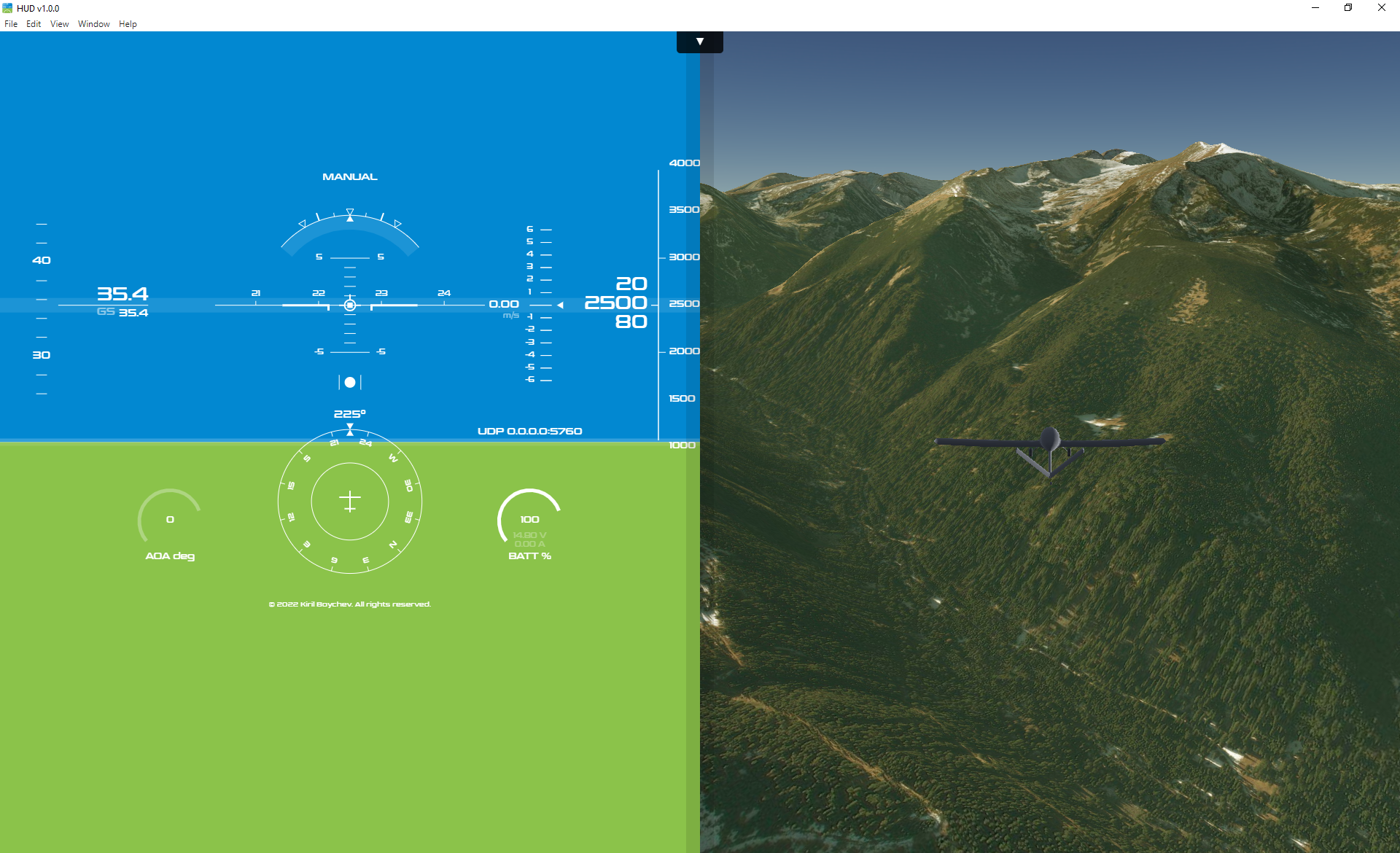
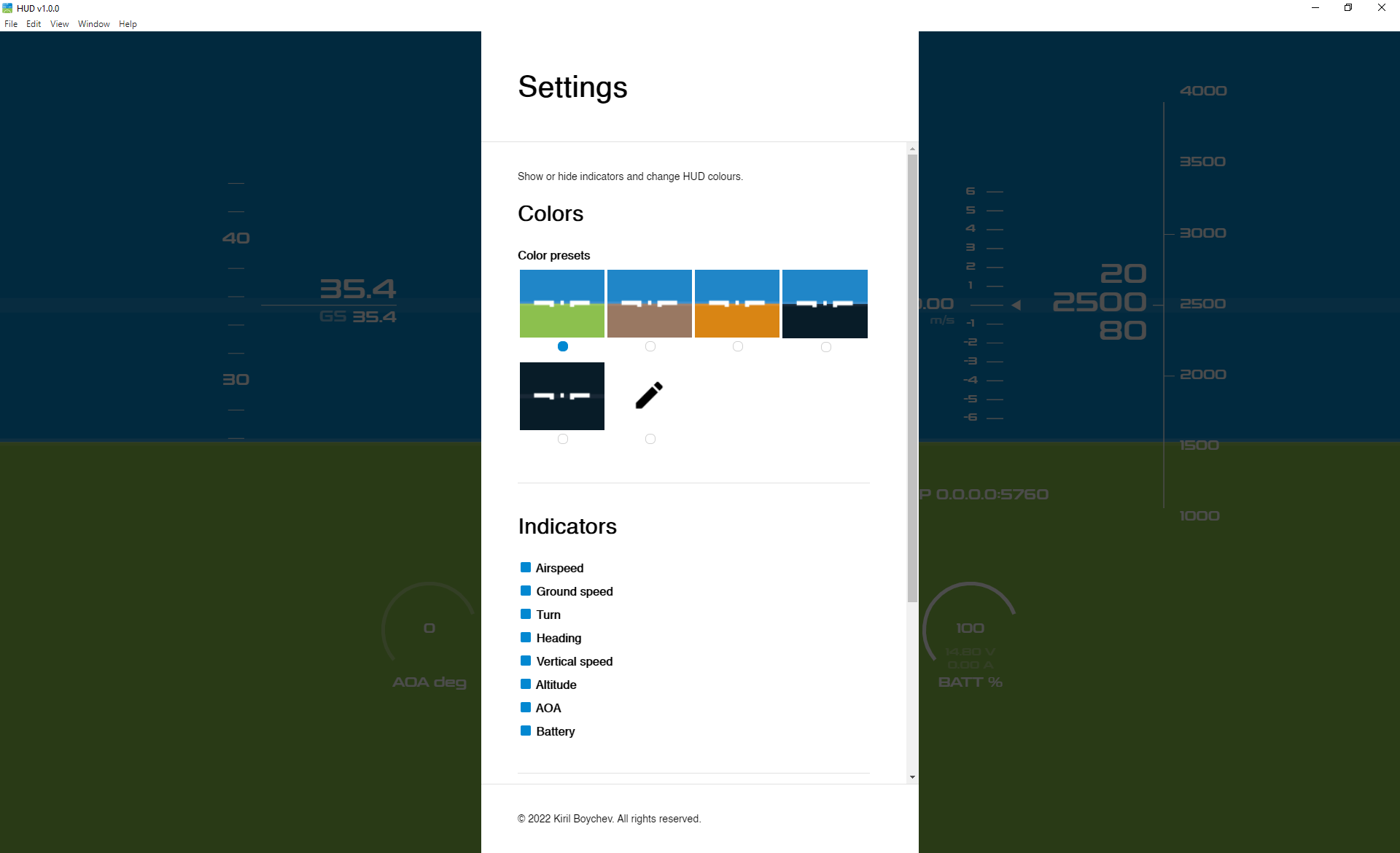
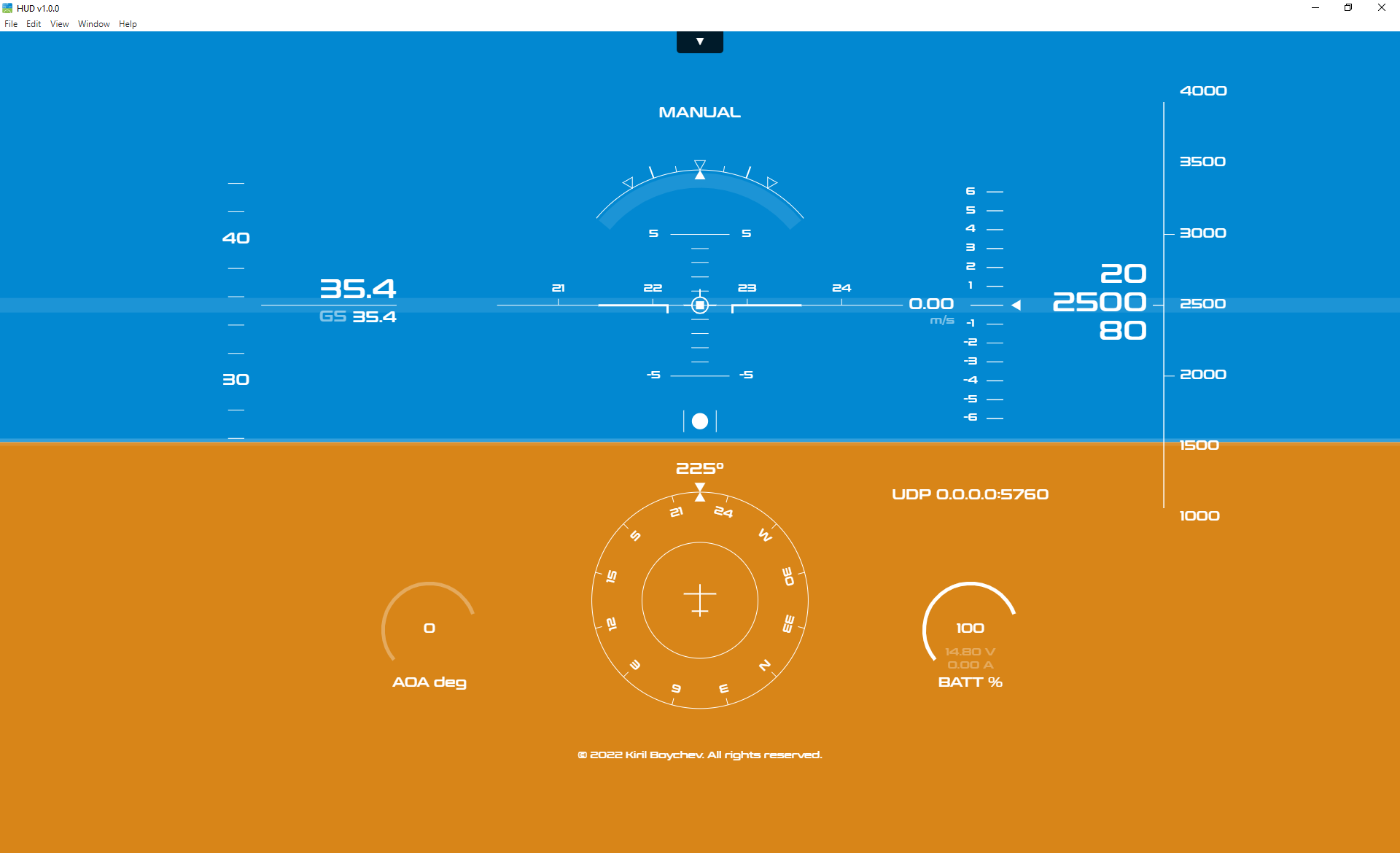
A real-time UAV simulator created in Simulink implementing a 6DOF ECEF (Quaternion) block and a custom ground forces and moments block allowing takeoff/landing simulations. The stability derivatives of the UAV were obtained with an in-house panel code developed by me. More information about the panel code can be found at apm.aviumtechnologies.com. You can use the panel code to perform your own aerodynamic analysis. Data from the simulator is visualised with an in-house PFD application. The PFD application listens for UDP packets on port 5760. For more information, download the PFD application from fst.aviumtechnologies.com and read the "Get started" section. The PFD application is available for Windows. Simulink examples are also provided.
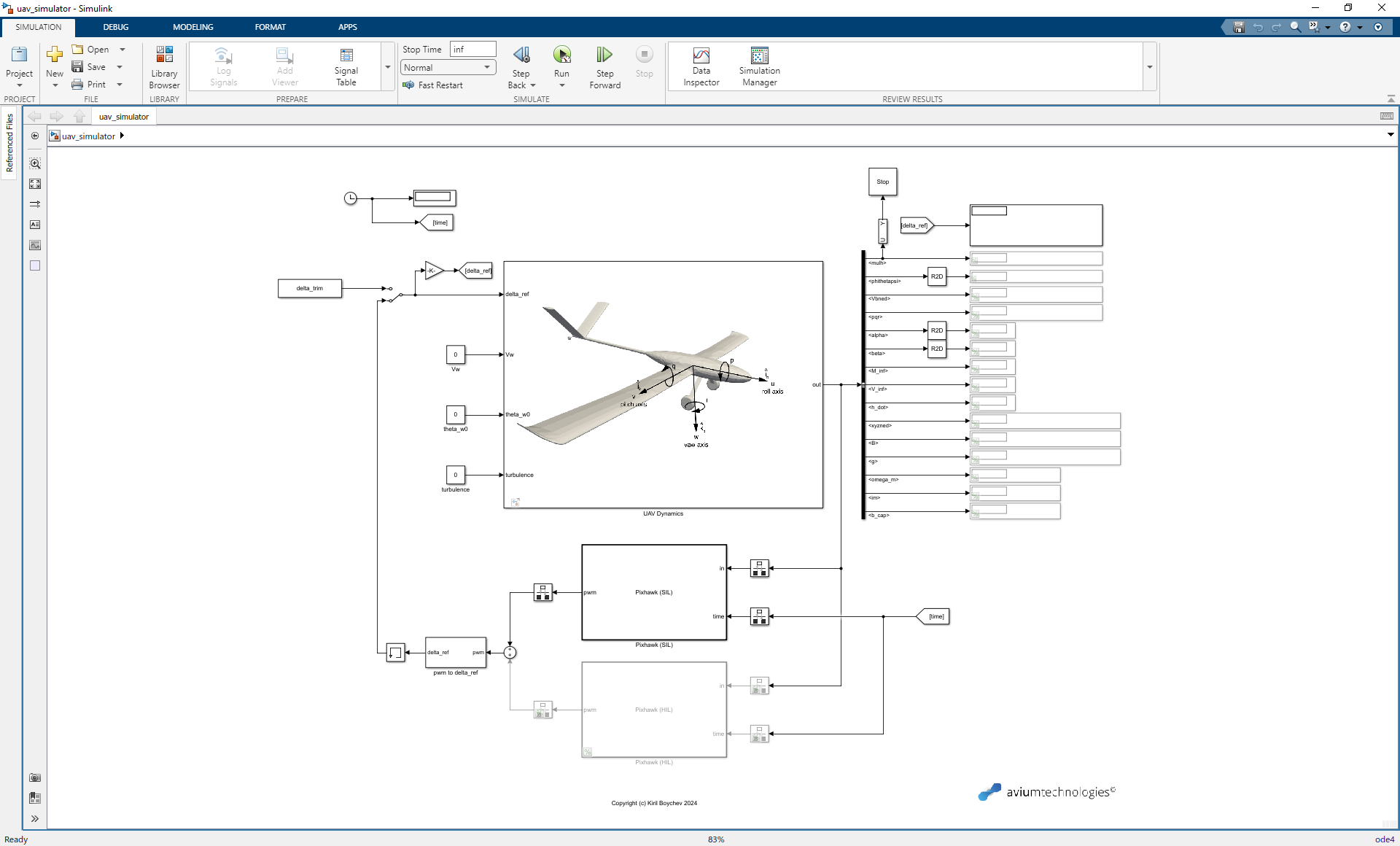
Custom C++ S-function blocks allow the simulator to be connected to the ArduPlane or Pixhawk software-in-the-loop (SITL) simulators. The C++ S-function blocks use the Asio C++ library for UDP communication. The source code of the C++ S-function block along with Simulink examples can be obtained from:

Next: Aircraft ground interaction model
Back to: About